

Elekter. Mikrokontroller. Põhikomponendi
Elekter:
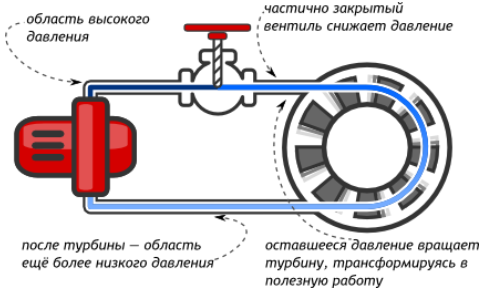
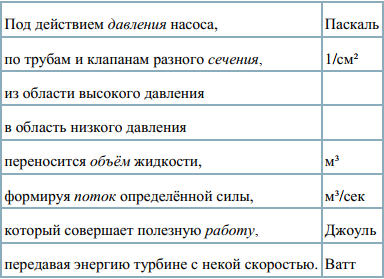
Гидравлическая система
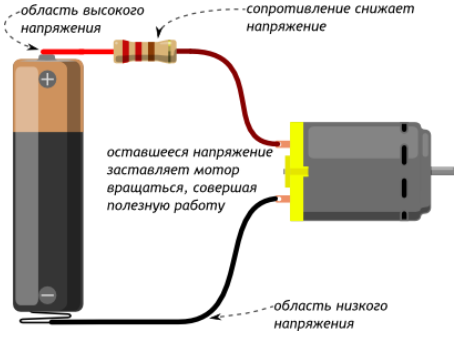
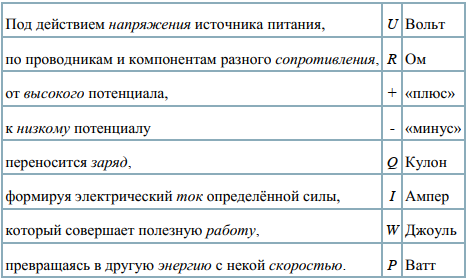
Электрическая цепь
Рисованная схема – использовать можно выглядить красиво но не практично
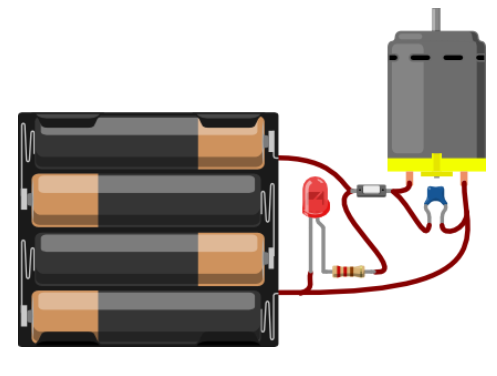
Принципиальная схема – в основном пользуються ею выглять компактно, красиво и практично
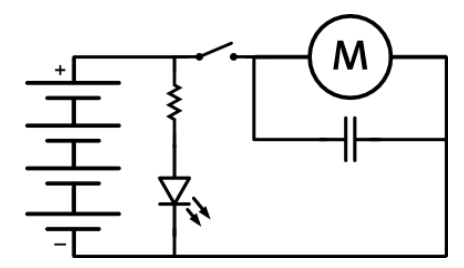
• То, что соединено линией, в реальности должно быть соединено проводником
• То, что не соединено линией, в реальности должно быть электрически изолировано
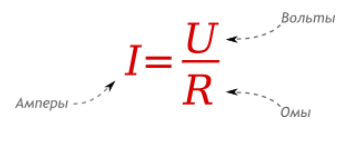
Закон Ома
Закон Ома — главный закон электричества
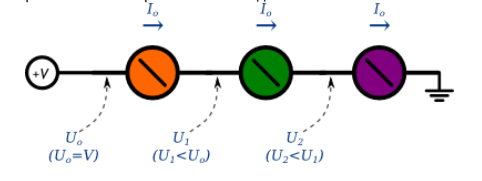
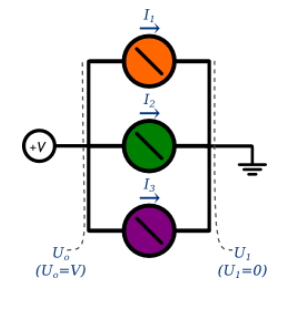
Последовательное подключение
При последовательном подключении сила тока в каждом потребителе — одна и та же, различается напряжение: в каждом компоненте падает его часть.
Параллельное подключение
При параллельном подключении напряжение вокруг каждого потребителя — одно и то же, различается сила тока: каждый потребляет ток в соответствии с собственным сопротивлением.
Robootikasüsteemid
Sõnad
Valgusdiood (LED)/светодиод,
Nupp/кнопка,
Piesosummer/пищалка,
Fototakisti/фоторезистор,
Takisti/резистор,
Potentsiomeeter/потенцтометр,
Temperatuuriandur/термодатчик,
Servomootor/серводвигатель,
Mootor/моторчик,
Vedelkristallekraan/LCD экран
Mikrokontroller
Ответы на вопросы:
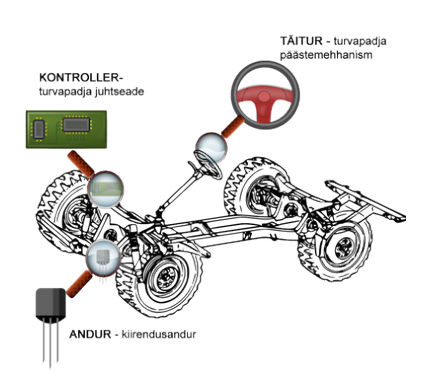
Mis on mehhatroonikasüsteemi peamised osad?
Mehhatroonikasüsteemi peamised osad on mehhanism (liikumisosa), andurid, aktuaatorid, kontroller ja tarkvara.
Mis on kontrolleri funktsioon mehhatroonikasüsteemis?
Kontrolleri funktsioon mehhatroonikasüsteemis on süsteemi juhtimine ja andmete töötlemine, et tagada õige toimimine vastavalt sisenditele ja soovitud väljunditele.
Milliste seadmete abil saab robot informatsiooni?
Robot saab informatsiooni anduritelt, nagu kaamera, liikumisandurid, temperatuuriandurid ja kaugusmõõturid.
Tooge kaks näidet (kontrolleriga ühendatavat seadet), kus mikrokontrolleri füüsiline viik peaksolema seadistatud a) väljundiks ja b) sisendiks.
a) Väljundiks – servo mootor, mis liikumisjuhte teostab.
b) Sisendiks – temperatuurimõõtur, mis saadab andmeid kontrollerile.
Mikrokontroller
Mikrokontrollerit võib võrrelda pisikese arvutiga, mis lisaks oma põhifunktsioonile: instruktsioonide täitmisele, omab ka küllalt laia kiipi integreeritud perifeeriaseadmete ja liideste hulka.
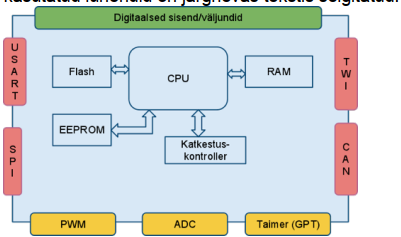
Mälu
Kasutaja seisukohalt on oluline eristada kahte tüüpi mikrokontrolleri mälu. Esimeseks mälutüübiks on programmimälu (Flash), kuhu laetakse mikrokontrolleri kompileeritud tööprogramm, milles sisalduvad kasutaja poolt koostatud instruktsioonid kontrolleri tööks.
Registrid
Registriteks nimetatakse mikrokontrolleri mälupesasid, millel on kindel aadress ja nimi.
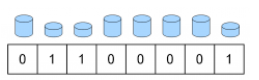
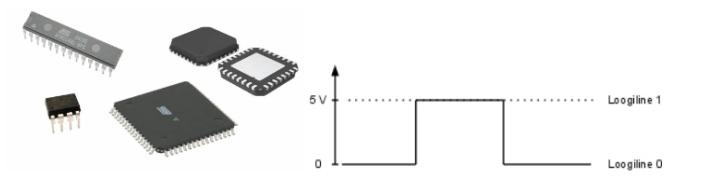
Digitaalne sisend-väljundid
Üldkasutatavad sisend-väljund viigud tegelevad üldjuhul digitaalsignaalide vahetamisega kontrolleri ja välisseadme vahel. Viiku saab ise programmeerida, kummas suunas ta töötab, vastava registri väärtuse seadmisega. Näiteks 0 (lüliti on üleval) tähendab, et viik töötab sisendina ja 1 (lüliti on alla vajutatud), et viik töötab väljundina.
Analoog-digitaal muundur
Mikrokontroller on digitaalseade ja kõik operatsioonid ning andmevahetus kontrolleris ja välisseadmete vahel käib digitaalsignaalidega. Reaalne maailm meie ümber on aga paraku analoogne, see tähendab, et enamus füüsikalisi nähtusi omab pidevaid suurusi, mida me mikrokontrolleriga mõõta tahaksime. Näiteks temperatuur ei ole ainult 0 või 1, vaid omab lõpmatu palju vahepealseid väärtusi.
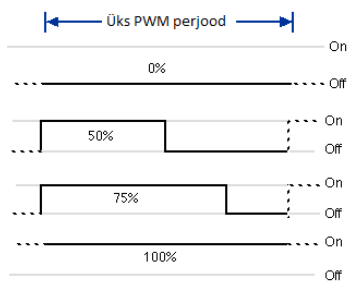
Pulsilaiusmodulatsioon
Pulsilaiusmodulatsioon (Pulse-width Modulation – PWM) on digitaalsignaali tüüp, mis võimaldab lisaks lihtsale sisse-välja tüüpi digitaalsignaalile imiteerida seadmete jaoks analoogsignaali.
Ответы на вопросы:
Какова цель различных типов памяти микроконтроллера?
Память программы (Flash) используется для хранения программы, а память данных (EEPROM) — для хранения данных.
Что означает электрическое 0 и 1 на выходном контакте контроллера?
0 означает отсутствие напряжения (выключено), 1 — наличие напряжения (включено).
Какова минимально измеряемая величина 10-битного аналогово-цифрового преобразователя, если опорное напряжение составляет 5 В?
5 В / 1024 = 0,00488 В (или 4,88 мВ).
Какой должна быть форма сигнала PWM, чтобы достичь ¾ оборотов подключенного к контроллеру двигателя?
Длительность высокого состояния сигнала должна составлять 75% от общего времени цикла.